

How To Finish Papr Registation In Iccv
")
Paper Viewing Graph Solvability via Bike Consistency co-authored by Federica Arrigoni, Andrea Fusiello, Elisa Ricci, and Tomas Pajdla were awarded Marr Prize Best Paper Honorable Mention at the ICCV 2021 in Montreal. ICCV – IEEE International Conference on Computer Vision – is the premier international estimator vision effect with 1600+ accustomed papers (out of more 6000 submitted) in 2021.
Tomas Pajdla from Applied Algebra and Geometry Group of the CIIRC CTU ranks equally the 3rd top computer vision researcher in the Czech Democracy co-ordinate to Guide2Research . At the previous upshot, ICCV 2019, Tomáš Pajdla was one of the authors of the Best Student Newspaper .
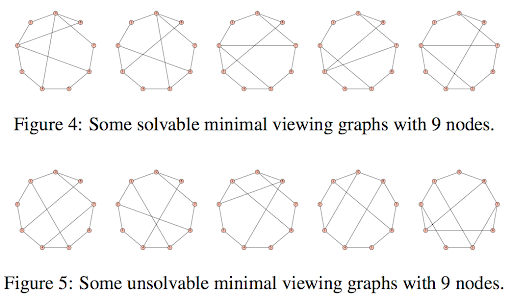
In structure-from-motion, the viewing graph is a graph where vertices correspond to cameras and edges represent relative poses of the cameras represented by cardinal matrices. Paper presented a new formulation and an algorithm for establishing whether a viewing graph is solvable, i.eastward. it uniquely determines a gear up of projective cameras from its viewing graph. Previously known theoretical atmospheric condition either did not fully characterize the solvability of all viewing graphs or are exceedingly hard to compute for they involve solving a system of polynomial equations with a large number of unknowns.
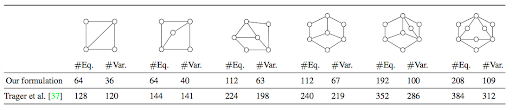
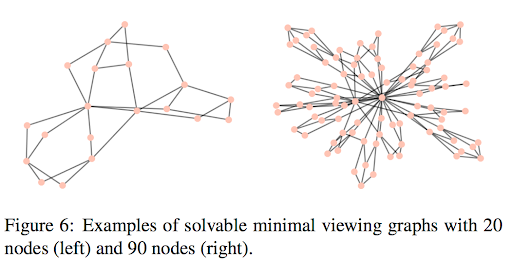
The main result of this paper is a method for reducing the number of unknowns by exploiting the bicycle consistency. It advances the understanding of the solvability by (i) finishing the nomenclature of all previously undecided minimal graphs upwards to ix nodes, (two) extending the practical solvability testing up to minimal graphs with upwardly to 90 nodes, and (iii) definitely answering an open up research question by showing that the finite solvability is not equivalent to the solvability. Finally, the newspaper presents an experiment on real information showing that unsolvable graphs are appearing in practical situations.
„In applications, our result helps to recognize situations where there is not enough information to do uncalibrated 3D reconstruction from images, thus making reconstruction algorithms faster and more robust," says Tomas Pajdla.
The inquiry leading to the paper was supported by the European Regional Development Fund under the project Touch on (reg. no. CZ.02.1.01/0.0/0.0/15 003/0000468) and by Eu H2020 Program under the project Bound (No. 871245).
Federica Arrigoni, Andrea Fusiello, Elisa Ricci, Tomas Pajdla; Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2021, pp. 5540-5549


How To Finish Papr Registation In Iccv,
Source: https://www.ciirc.cvut.cz/iccv2021/
Posted by: swansonfulta1954.blogspot.com
0 Response to "How To Finish Papr Registation In Iccv"
Post a Comment